Lektion 10: Trafiksimulering. Obligatorisk redovisning 5.1 och 5.2.
| Moment: | Objektorienterad design och implementation. Simulering. Flera samverkande klasser. |
| Uppskattad arbetstid: | 12 timmar ? |
| Redovisning: | Muntligt för lärare/assistent i två steg enligt information på kurssidan. |
Förberedelser
Skapa en mapp för denna lektion med namnet lektion10.
Ladda ned följande i mappen:
| Filer att ladda ner | |
|---|---|
Simulation.java |
Innehåller en main med en tidsstegsloop som driver simuleringen
genom anrop till metoder.
Den innehåller också en globalt tillgänglig klocka(Simulation.getTime()).
|
VehicleGenerator.java |
Skapar fordon med varierande intensitet. Klassen är helt färdig och skall inte ändras. |
Vehicle.java |
Skal till fordonsklassen. Skall fyllas med kod. |
Light.java |
Skal till ljussignalsklassen. Skall fyllas med kod. |
Lane.java |
Skal till klassen som definierar körfiler. Skall fyllas med kod. |
TrafficSystem.java |
Skal till klassen som ska representera ett trafiksystem med körfiler och signaler. |
Se också till att du har tillgång till klassen Measurements som
tidigare skrivit till exempel genom att kopiera den till denna mapp.
Läs återigen kodningsreglerna och se till att du följer dem när du börjar koda!
Simuleringar
Ett stort användningsområde för datorer är simuleringar dvs att man skapar en datormodell av någon process (i vid bemärkelse) som man vill studera. Det kan röra sig om en modell för vädret eller klimatet, för hur snödrivor bildas kring olika byggnader, för trafikflödet i ett gatunät eller för en värld med sköldpaddor som föds, äter, lever och dör.
Meningen med modellen är att man skall kunna göra förutsägelser om vad som händer om man ändrar olika parametrar (släpper ut mer koldioxid, ändrar byggnadens form, gör en rondell eller ger sköldpaddorna mer mat ...).
Det är i regel väsentligt billigare att experimentera med en datormodell än att göra det i verkligheten (bygga en eller flera olika rondell) eller att göra det med fysiska modeller (bygga modellhus och blåsa potatismjöl på dem i en vindtunnel).
När man bygger modeller så måste man i regel förenkla och bortse från många detaljer som man inte tror har någon eller åtminstone bara liten effekt.
Ett sätt att göra simuleringar är att dela upp tiden i ett antal diskreta tidssteg. Man utgår från ett starttillstånd och stegar sig sedan fram i tiden och noterar vad som händer i varje tidssteg:
Ibland kan man veta exakt vad som sker varje steg men oftast har man bara approximationer. Dessutom kan det finnas ett visst mått av slump som man får approximera med någon sannolikhet. Man vet till exempel sällan exakt vid vilka tidpunkter ett fordon anländer till en rondell men man kan ha mätt upp en intensitet så att man har en sannolikhet för att ett fordon skall anlända ett visst tidssteg.
Problembeskrivning
Programmet ska kunna simulera trafikflödet i olika typer av trafiksystem.
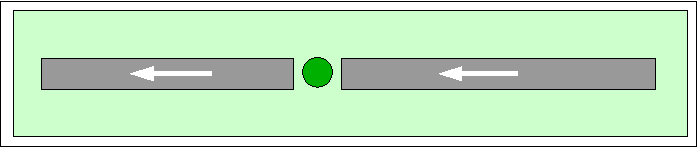
Exempel 1
En väg med en trafiksignal: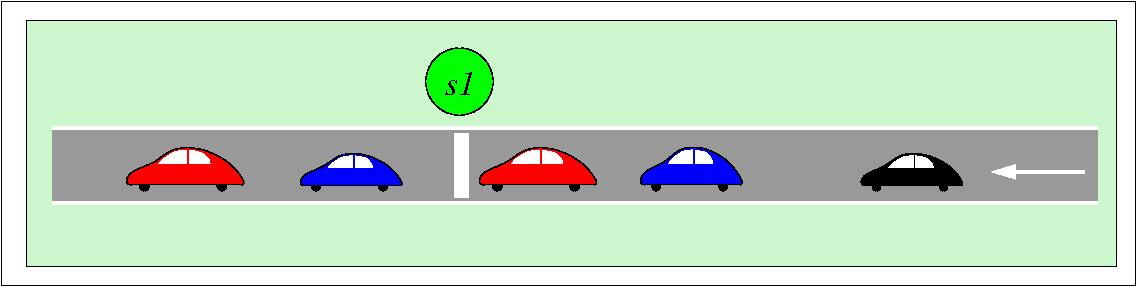
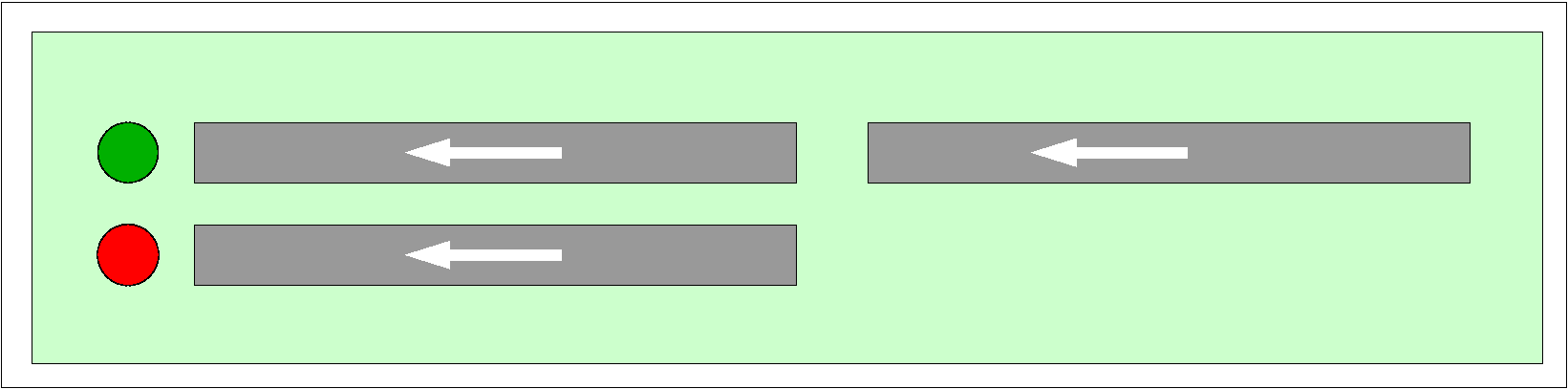
Exempel 2
En väg med en svängfil och två ljussignaler: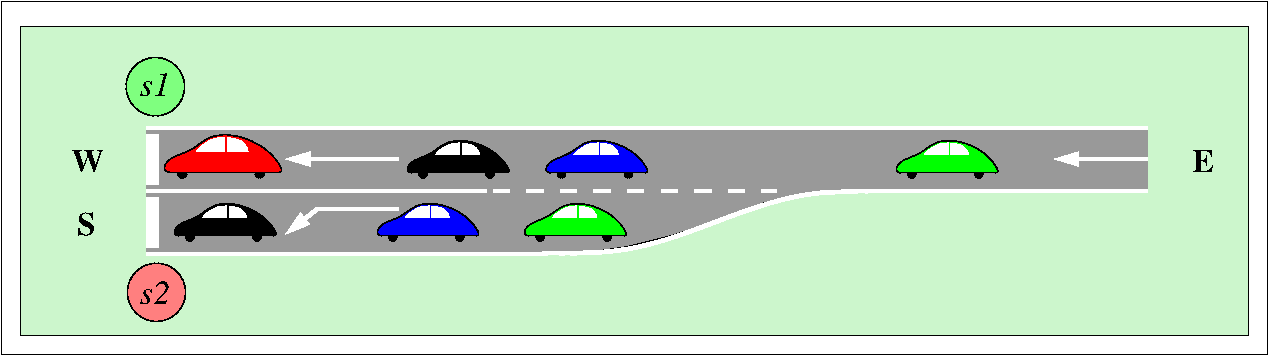
Exempel 3
En korsning: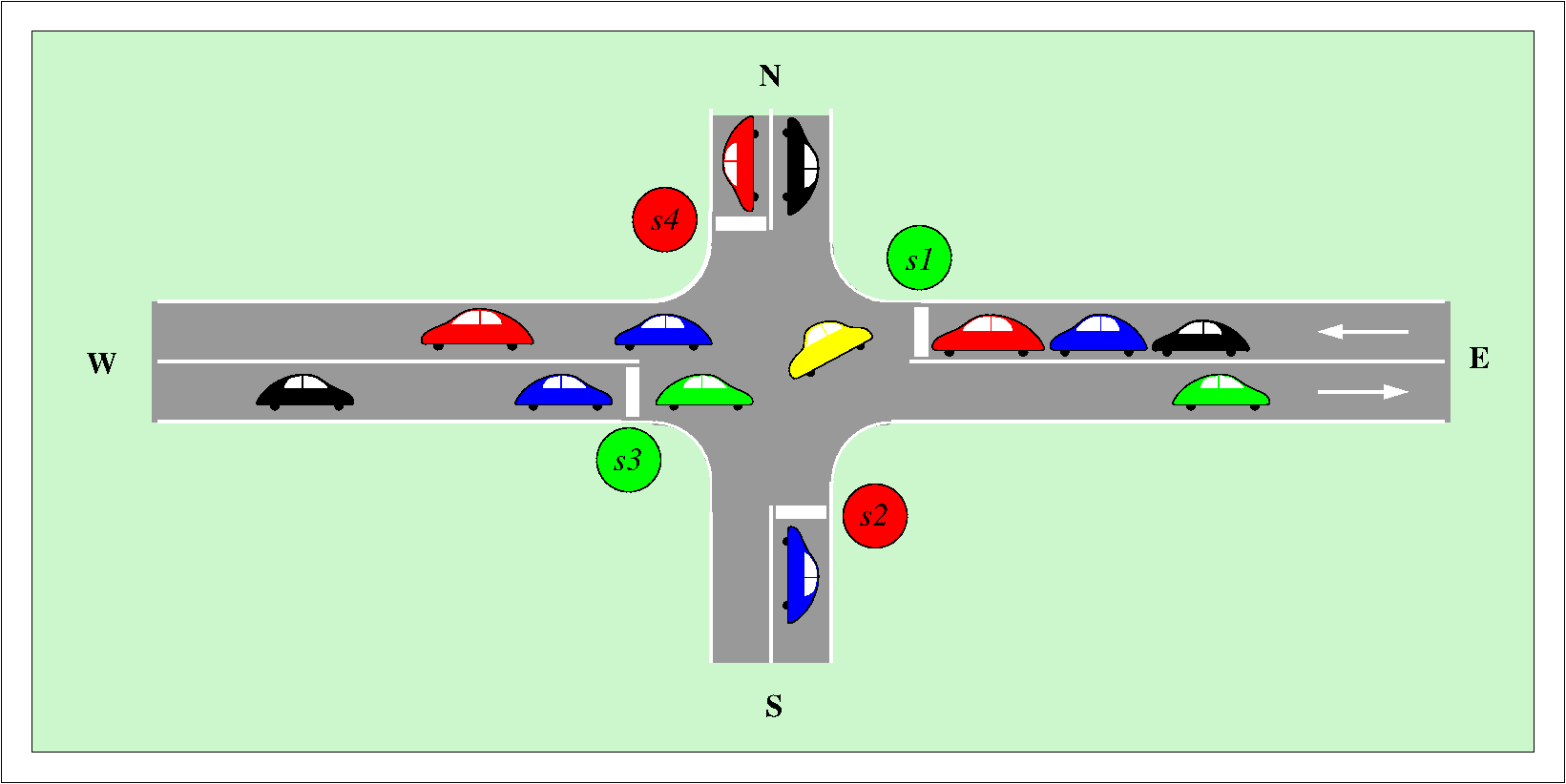
Korsningen kontrolleras alltså av de fyra ljussignaler s1, s2, s3 och s4.
Ett problem i denna typ av korsningar är att fordon som kommer från E
och vill svänga vänster mot S i korsningen blir blockerade
av fordon som kommer från W vilket i sin tur blockerar fordon
som vill köra rakt fram.
Exempel 4
För att lösa problemet avser man att bygga svängfiler för fordon som kommer från
E respektive W och som skall vänster i korsningen dvs
man vill ha en korsning av detta utseende:
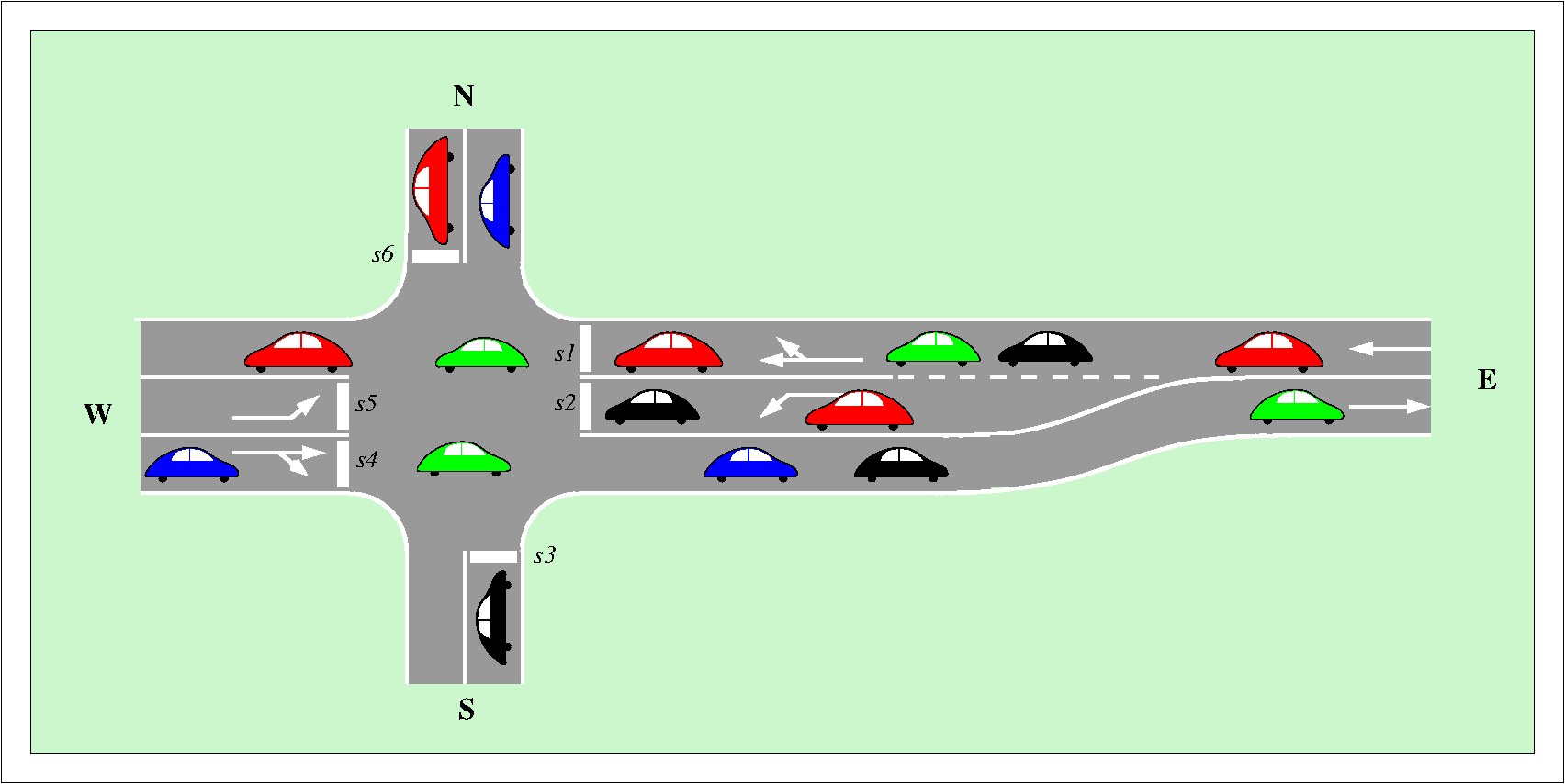
Denna korsning har alltså svängfiler kontrollerade av signalerna s2 och s5.
Datormodell
Ett trafiksystem ska byggas upp av två generella komponenter:
trafikljus (klassen Light) och körfiler (klassen Lane).
Det innehåller också ett varierande antal fordonsobjekt (klassen Vehicle).
Vidare används klassen Simulation för att driva simuleringen och klassen
VehicleGeneretor för att generera ny fordon till systemet.
Klassen Vehicle
Se diskussion och specifikation.
Klassen Light
Ett trafikljus kan ha två lägen: "grönt" som tillåter passage och "rött" som förbjuder passage. Se diskussion och specifikation av klassen.
Klassen Lane
En fil är en struktur som innehåller ett antal fordon och ett antal tomrum.
Fordonen kan bara komma in i början
och lämna i slutet av filen dvs filen är som ett "rör":

Anmärkning: I fortsättningen använder vi ordet fil eller fil-objekt för att beteckna en körfil och datafil eller Java-fil för att beteckna filer i datasystemet.
Klassen TrafficSystem
Klassen TrafficSystem definierar ett specifikt trafiksystem dvs den
håller reda på vilka filer och vilka signaler som ingår och hur fordonen ska
flyttas genom systemet.
För att t ex representera systemet i exempel 1 behövs två filer och en signal:
Klassen Simulation
Klassen Simulation innehåller
main-metoden som sköter om tidsstegningen som beskrevs inledningsvis:
|
skapa komponenterna
time = 0
while (true)
time = time + 1
uppdatera alla komponenter
presentera tillståndet
|
TrafficSystem tf = new TrafficSystem();
time = 0
while (true) {
time = time + 1;
tf.step();
tf.print();
}
|
|
Väsentliga funktionen av |
Klassen tillhandahåller också en globalt tillgänglig
klocka genom klassmetoden getTime(). Den kan bl. a.
användas av konstruktorn för Vehicle och av metoden isGreen()
i klassen Light.
Klassen VehicleGenerator
Denna klass används för att generera nya fordon med varierande intensitet och destination.
Klassen är helt given och ska inte ändras.
Använd den parameterlösa konstruktorn för att skapa objektet.
Varje anrop till metoden step() returnerar sedan antingen
ett fordon eller null.
Se dokumentationen för en mer detaljerad beskrivning av klassen.
Det första systemet
Du ska simulera systemet i exempel 1:
dvs ett system med två filer och trafiksignal.
Lämplig arbetsgång
-
Ladda ner Java-filerna om du inte redan gjort det.
Programmet (
Simulation) går att kompilera och köra direkt även om det inte producerar något av intresse. -
Klassen
Vehiclekan tills vidare användas som den är given men kom ihåg att den måste kompletteras längre fram. -
Implementera metoderna i klassen
Lane. Skriv också enmain-metod i klassen som visar att metoderna fungerar. Se beskrivningen! -
Uppdatera klassen
TrafficSystem:- Lägg till instansvariabler för ett fil- och ett fordonsgenerator-objekt.
-
Skapa filen och och fordonsgeneratorn. Du kan direkt välja en fillängd (10 t ex)
och använda den parameterlösa konstruktorn till fordonsgeneratorn.
(Du behöver inte använda de fördefinierade instansvariablerna för fillängder och signalparametrar - dessa är avsedda för det andra systemet.) -
Skriv
print-metoden. Den behöver bara skriva ut det som filenstoString-metod returnerar. -
Skriv stegmetoden så att den börjar med att ta ut första fordonet från filen,
därefter stegar filen med dess
step-metod och slutligen anropar fordonsgeneratornsstepmetod. Om denna lämnar ifrån sig ett fordon läggs det sist på filen. - Testkör! Nu bör du se hur fordonen glider genom filen.
-
Implementera klassen
Lightenligt beskrivningen. Läs specifikationen så att du ser exakt t ex vad desstoString-metod ska returnera! -
Uppdatera
TrafficSystemmed ett trafikljus och en fil till dvs lägg till dessa som instansvariabler och uppdatera konstruktorn ochprint-metoden.Gången i
step-metoden blir nu:- Stega den nya filen
- Om signalen är grön och det finns ett fordon först på den gamla filen så ska det flyttas från den gamla till den nya.
- Stega den gamla filen
-
Om fordonsgeneratorns
step-metod ger ett fordon ut ska det placeras sist på den gamla filen.
Observera att ordningen i stegningen är viktig. Dock kan det vara snyggare om man börjar med att stega signalen eftersom man då ser att den är grön innan något fordon passerar.
Nu har det dock uppstått ett problem: Det kan hända att sista platsen på gamla filen inte är ledig när vi vill lägga ett fordon där. Eftersom vi inte får tappa bort fordon organiserar vi en kö med hjälp av ytterligare en instansvariabel
ArrayList<Vehicle> queue. Kön ska också skrivas ut avprint-metoden. Enklast är att använda arraylistanstoString-metod.Tips: Enklast kod blir det om man alltid placerar tillkommande fordon i kön och sedan hämtar det första från kön. Se till att du inte lagrar
null-referenser på kön! -
Även om det inte behövs för första delen så är det lämpligt att se över
klassen
Vehicle. Du behöver uppdatera konstruktorn samtget- ochtoString-metoderna. Du måste också se till atttoString-metoden iLane-klassen använderVehicle-klassenstoString- ellergetDestination-metod. Detta är ett måste för del 2 av uppgiften. - Redovisa!
Det andra systemet
Du ska implementera systemet i exempel 2 dvs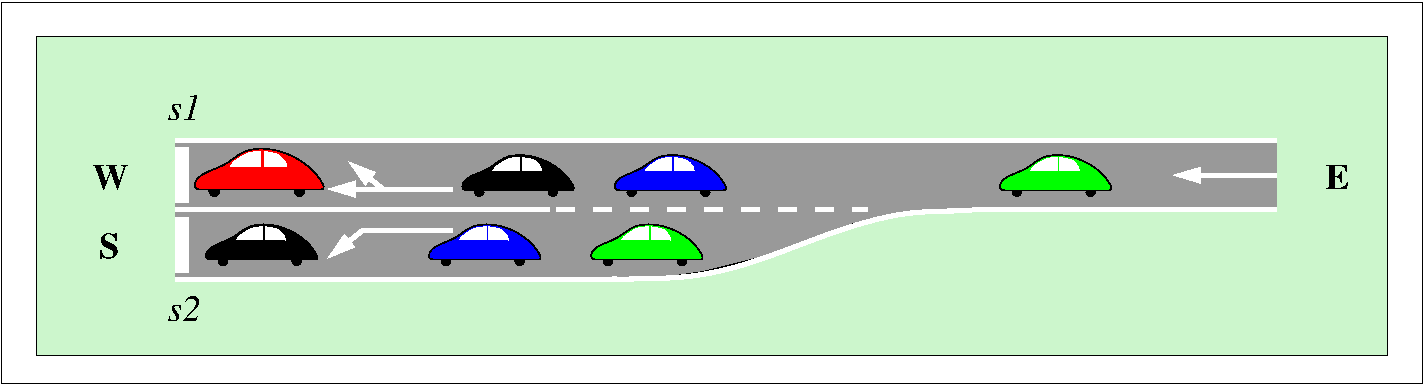
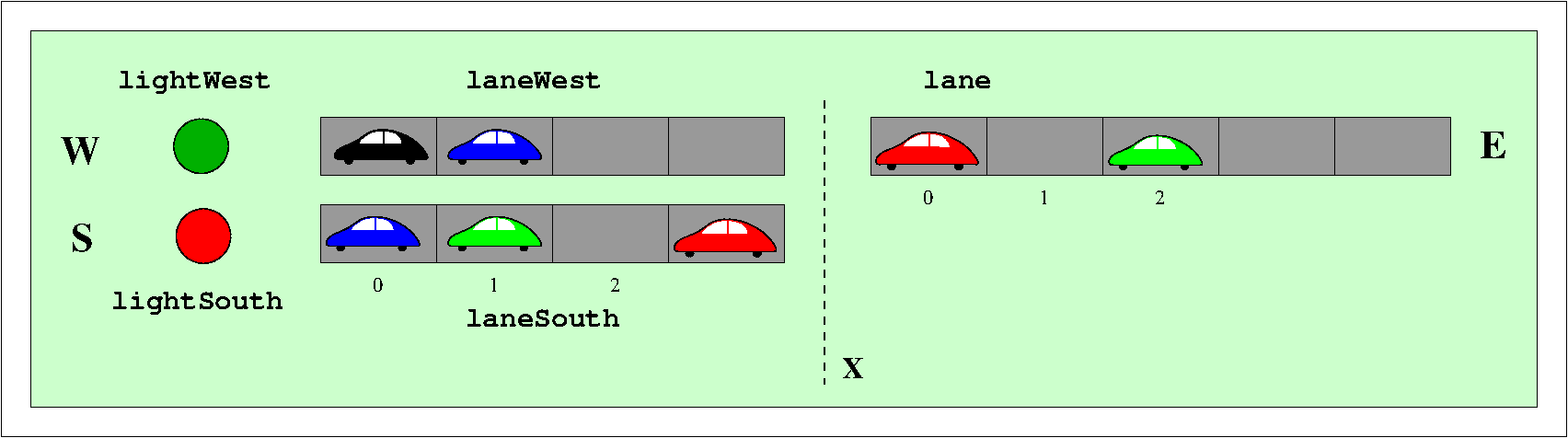
Trafiksystemet ska således bestå av tre filer (lane, laneWest och
laneSouth)
och ljussignalerna lightWest och lightSouth (tidigare kallade s1 och s2):
Det kan vara snyggt att ha korta körfiler efter signalerna så att man ser hur fordonen passerar.
Vid punkten E finns det en kö (ej utritad) som implementeras med hjälp av en ArrayList.
Instansvariabler för fillängder och signalperioder finns fördefinierade i kodskalet. Använd dessa!
Vid ett tidssteg kan en eller flera av följande saker hända:
- ett fordon passerar en signal (om den är grön),
- ett fordon avancerar ett steg i en fil (om platsen framför är ledig)
-
ett fordon omedelbart framför
X(dvs i position0på filenlane) flyttas tilllaneWestellerlaneSouthberoende på dess destination (WellerS), -
ett fordon anländer till systemet vid punkten
Eoch ställs i kön, -
om sista platsen i
laneär ledig och det finns fordon i kön tas första från kön till sista platsen ilane, - den ena eller båda signalerna skiftar färg.
En simulering består alltså av en tidsstegning där ovanstående saker händer. Det är lämpligt att momenten, precis som i verkligheten, utförs i den ordning de står i ovan.
Observera att klasserna Lane och Light inte behöver
ändras - endast TrafficSystem behöver göras om.
(I klassen Vehicle behöver toString-metoden modifieras
så att den returnerar destinationsbokstaven i stället för X.)
Indata till en simulering
Programmet styrs av följande indata:
-
ankomstintensitet dvs sannolikheten att ett fordon dyker upp vi
Evid ett tidssteg, -
sannolikheten att ett skapat fordon skall svänga dvs ha
Ssom destination, - längderna på filerna och
- ljussignalernas karakteristik (period och grönperiod),
De två första värdena (ankomstintensitet och sannolikhet att svänga) varierar med tiden.
Detta hanteras av klassen VehicleGenerator.
Klassen är helt given och du behöver bara förstå hur den ska användas, inte hur den fungerar.
För de två sista punkterna, dvs längderna på filerna och ljussignalernas karakteristik, finns
ett antal fördeklarerade och initierade variabler i TrafficSystem:
Lane- och Light-objekten.
Konstruktorn i den givna koden för TrafficSystem börjar med att försöka läsa en datafil med
andra värden för fillängder och signalparametrar men om filen inte finns så behålls de givna värdena.
Om du vill kan du kopiera filen
properties.txt och lägga den bland dina java-filer.
Orsaken till att man vill definiera dessa egenskaper på en indatafil är att man lätt vill kunna experimentera med olika uppsättningar av värden.
Resultat av en körning
-
Initial utskrift av simuleringsparametrarna genom metoden
printSetup. Exempel:Simulation parameters: laneLength : 11 laneWSLength : 8 lightPeriod : 14 lightSouthGreen: 4 lightWestGreen : 6 -
Statistik innehållande
-
Genomsnittliga, minimala och maximala tider (antal tidssteg) för fordon att passera ljussignalen
lightWestrespektivelightSouth. -
Andel tidssteg som delningspunkten
Xvarit blockerad. Med blockerad menas att det inte går flytta ett fordon från filelanepå grund av att sista platsen i dess destinationsfil är upptagen. -
Andel tidssteg som det funnits fordon i kön vid entrypunkten (
E).
Samla tiderna för fordon som lämnar systemet i två
Measurements-objekt (nätlektion 7), ett för vardera utgång, och använd dessa för att ta fram statistiken till punkt a). (Komplettera klassenMeasurementsmed en metod för att returnera maxvärdet om du inte redan har gjort det.)Statistiken skall skrivas ut av metoden
printStatisticsiTrafficSystem. Metoden skall kunna anropas när som helst under simuleringen. Exempel på utskrift:Statistics after 400 timesteps Arrived at E : 164 Total left : 143 Number in the system : 21 Exit west Number: 69 Mean : 30.1 Min : 24 Max : 48 Exit south Number: 74 Mean : 37.5 Min : 24 Max : 59 Percent time step with block: 11.0 Percent time step with queue: 2.3 -
Genomsnittliga, minimala och maximala tider (antal tidssteg) för fordon att passera ljussignalen
-
En enkel ögonblicksbild av systemet vid ett visst tidssteg. Exempel:
(G) <WW..W..W> <SSW.S..WWS.> Queue: [] (R) <SSSS.SS.>Denna utskrift skall göras av metoden
printsom anropas varje tidssteg frånSimulation. Ögonblicksbilder av systemet vid de tre följande tidsstegen. Exempel:(G) <W..W..W.> <SW.S..WWS.S> Queue: [] (R) <SSSSSS.S> (R) <..W..W..> <W.S..WWS.SS> Queue: [] (R) <SSSSSSSS> (R) <.W..W..W> <.S..WWS.S.W> Queue: [] (R) <SSSSSSSS>Så här kan det se ut om det uppstått en kö:(R) <W..WWW..> <SWWWWSSSSWW> Queue: [S, W, W, S] (R) <SSSSSSSS>
Innan du redovisar
Se till att- Koden följer kodningsreglerna!
- Klasserna uppfyller dessa specifikationer. Kom ihåg att specifikationerna är heliga! Klasser och metoder ska exakt angivna namn, funktion och parametrar!
- Att all efterfrågad statistik finns med.
-
Metoden
printproducerar utskrifter enligt ovanstående exempel.
Lämplig arbetsgång och tips
-
Ladda ner alla filerna enligt lektionssidan.
Då finns ett embryo till alla klasser som skall vara med.
Koden går att kompilera och det går att köra
main-metoden i klassenSimulationmen den producerar inte några intressanta utskrifter. -
Klassen
Vehiclekan, till att börja med, användas precis som den är given. -
Klassen
Lightär enkel och oberoende av alla andra klasser. Skriv och testa den direkt! Kontrollera att du följer specifikationen! -
Implementera klassen
Lane:-
Instansvariabeln
Vehicle[] theLaneär given. Inga andra instansvariabler behövs. -
Skriv en
toString-metod. En tom plats (dvs närtheLane[i] == null) skall representeras av en punkt medan en plats som har ett fordon används fordonetstoString-metod. Så här kan det se ut:<X.XX...X..X...X.>(toString-metoden i den nedladdadeVehicle-klassen returnerarX.) Använd tecknen<och>för att avgränsa filen. -
Metoden
stepgår från vänster till höger och flyttar fram alla fordon utom det första ett steg, under förutsättning att platsen framför är ledig. Resultatet efter ett steg med exemplet ovan blir:<XXX...X..X...X..>Observera att denna metod inte tar bort fordon från första eller lägger till fordon på sista platsen! -
Skriv metoderna
getFirst,removeFirstochlastFreeenligt specifikationen. De är alla mycket enkla. -
Skriv metoden
putLastsom också är enkel. Metoden ska förhindra att någon lägger ett fordon sist om den platsen är upptagen. Detta är nämligen ett besvärligt fel som gör att fordon tappas bort och statistiken blir felaktig. Det bästa sättet att göra det är att kasta ett undantag som beskrivs i lektion 8. För enkelhetens skull utnyttjar vi den existerande undantagsklassenRuntimeExceptiongenom att skrivathrow new RuntimeException("Last position occupied");om sista positionen är upptagen. Programmet avbryts med felutskrift om detta är fallet. -
Skriv en
main-metod som demonstrerar att metoderna fungerar. Se till att den steppar så långt att ett fordon kommer genom hela filen.
-
Instansvariabeln
-
Nu är det dags för att börja med klassen
TrafficSystem. Gör först ett system bestående av en fil och en arraylist för att köa fordon som inte går att lägga in på filen. Tag också med fordonsgeneratorn från början.Du behöver alltså följande instansvariabler:
private Lane lane; private VehicleGenerator vg; private ArrayList<Vehicle> queue;Dessa måste ges värden i kontruktorn:
this.loadProperties("properties.txt"); this.vg = new VehicleGenerator("probabilities.txt"); this.lane = new Lane(this.laneLength); this.queue = new ArrayList<Vehicle>();(Vi passade här på att ladda in filenproperties.txtsom ger värden åt de fördefinierade instansvariablerna för fillängder och signalkaraktäristik. Vi utnyttjade också en av dessa instansvariabler för att definiera längden på filen.)Innan du kan köra måste du göra några saker i
step-metoden. Minimalt ärlane.step(); Vehicle v = vg.step(); lane.putLast(v);Lägg in
System.out.println(lane);iprint-metoden och körSimulation!Eftersom det inte finns någon mekanism som tar bort fordon från filen kommer den bli full och leda till ett
RuntimeException.Det är nu lämpligt att använda kön i som ska ta hand om bilar som inte kommer in på filen. Enklast är att alltid lägga
vpå kön i stället för på filen (kontrollera först attvinte ärnull!). Om det sedan finns plats på filen och kön inte är tom hämtar man det som ligger först på kön och lägger det på filen.Testkör igen!
-
Lägg sedan övriga komponenter (filer och signaler) en i taget, uppdatera konstruktorn
samt
step- ochprint-metoderna. -
Se till att
step-metoden gör sakerna i denna ordning:- Ta fordon förbi signalerna om de är gröna.
- Stega filerna omedelbart framför signalerna.
- Behandla fordonet vid delningspunkten X.
- Stega den första (högra) filen.
- Anropa fordonsgeneratorn enligt beskrivningen ovan.
- Stega signalerna.
-
Samla tiderna för fordon som lämnar systemet i två
Measurements-objekt (ett för varje utgång) och se till attprintStatisticsskriver den efterfrågade statistiken. Kontrollera att statistiken är rimlig!
Innan du redovisar
Se till att- Koden följer kodningsreglerna!
- Klasserna uppfyller dessa specifikationer.
- Att all efterfrågad statistik finns med.
-
Metoden
printproducerar utskrifter enligt ovanstående exempel.

Dölj style3dev.css för att bli av med annoteringarna!